7.5 具有常系数的齐次线性系统
我们将主要关注具有常系数的齐次线性方程组——也就是形如
x′=Ax(1)
的系统,其中 A 是一个常数 n×n 矩阵。除非另有说明,我们将进一步假设 A 的所有元素都是实数(而不是复数)。
如果 n=1,那么系统简化为单个一阶方程
dtdx=ax(2)
其解为 x(t)=ceat。 请注意,当 a=0 时,x=0 是唯一的临界点。 如果 a<0,那么所有非平凡解都随着 t 的增加接近 x(t)=0,在这种情况下,我们说 x(t)=0 是一个渐近稳定平衡解。 另一方面,如果 a>0,那么每个解(除了平衡解 x(t)=0 本身)都随着 t 的增加而远离平衡解。 因此,在这种情况下,x(t)=0 是不稳定的。
对于 n 个方程的系统,情况类似但更复杂。 平衡解通过求解 Ax=0 来找到。 我们通常假设 detA=0,所以 x=0 是唯一的平衡解。 一个重要的问题是,其他解是随着 t 的增加而接近还是远离这个平衡解;换句话说,x=0 是渐近稳定的还是不稳定的? 或者还有其他的可能性吗?
n=2 的情况尤为重要,并且适合在 x1x2 平面(称为相平面)中进行可视化。 通过在大量点上评估 Ax 并绘制生成的向量,我们获得了微分方程组解的切向量的方向场。 通常可以从方向场中获得对解的行为的定性理解。 更精确的信息来自在图中包含一些解曲线或轨迹。 显示给定系统的轨迹的代表性样本的图称为相图。 一个精心构造的相图在一个图形显示中提供了关于二维系统所有解的易于理解的信息。 虽然创建定量准确的相图通常需要计算机辅助,但通常可以通过手绘绘制定性准确的相图,正如我们在下面的示例 2 和 3 中所演示的那样。
然而,我们的首要任务是展示如何找到诸如方程 (1) 之类的系统的解。 我们从一个特别简单的例子开始。
示例 1
找到系统的一般解
x′=(200−3)x(3)
解:
这个系统最重要的特征是系数矩阵的非对角线元素为零;也就是说,它是一个对角矩阵。因此,通过将系统写成标量形式,我们得到
x1′=2x1,x2′=−3x2.
这些方程中的每一个只涉及一个未知变量,所以我们可以分别求解这两个方程。这样我们发现
x1=c1e2t,x2=c2e−3t
其中 c1 和 c2 是任意常数。然后,通过将解写成向量形式,我们有
x=(c2e−3tc1e2t)=c1(0e2t)+c2(e−3t0)=c1(01)e2t+c2(10)e−3t.(4)
现在我们定义两个解 x(1) 和 x(2),使得
x(1)(t)=(01)e2t,x(2)(t)=(10)e−3t(5)
这些解的 Wronskian 行列式为
W[x(1),x(2)](t)=e2t00e−3t=e−t,(6)
它永远不为零。 因此,x(1) 和 x(2) 形成一个基本解集,方程 (3) 的一般解由方程 (4) 给出。
在示例 1 中,我们以指数函数乘以向量的形式找到了给定系统 (3) 的两个独立解。 这也许是可以预料的,因为我们已经发现其他具有常系数的线性方程具有指数解,并且系统 (3) 中的未知数 x 是一个向量。 因此,让我们尝试通过寻找形如下列的解来将这个想法扩展到一般系统 (1)
x=ξert(7)
其中指数 r 和向量 ξ 待确定。 将方程 (7) 中的 x 代入系统 (1) 得到
rξert=Aξert
消去非零标量因子 ert 后,我们得到 Aξ=rξ,或者
(A−rI)ξ=0(8)
其中 I 是 n×n 单位矩阵。因此,为了求解微分方程组 (1),我们必须求解代数方程组 (8)。后一个问题正是确定矩阵 A 的特征值和特征向量的问题。因此,只要 r 是系数矩阵 A 的一个特征值,且 ξ 是一个与之相关的特征向量,则由方程 (7) 给出的向量 x 就是方程 (1) 的一个解。
以下两个例子是具有实数且不同特征值的 2×2 系统的典型例子。在每个例子中,我们将求解该系统并构建相应的相图。我们将看到,解具有非常不同的几何模式,这取决于特征值是否具有相同的符号或不同的符号。在本节的稍后部分,我们将回到对一般 n×n 系统的进一步讨论。
示例 2
考虑以下系统
x′=(1411)x(9)
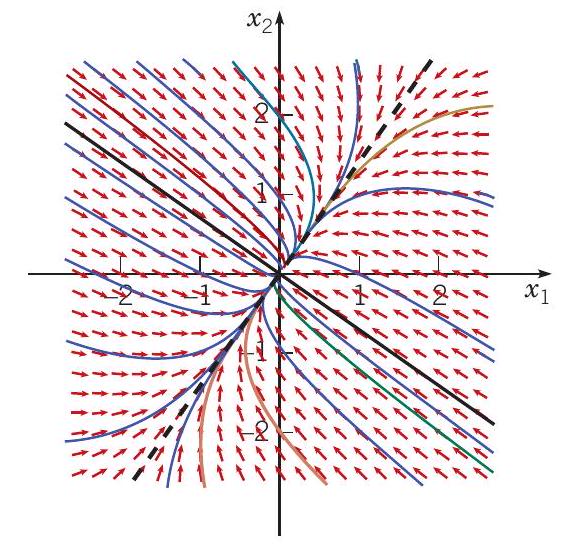
绘制方向场并确定解的定性行为。然后找到通解并绘制一个相图,显示几条轨迹。
解:
图 7.5.1 中显示的方向场由绘制在 −2.5≤x1≤2.5,−2.5≤x2≤2.5 正方形的 21×21 网格上的 441 个箭头组成。(在 x1 和 x2 中的步长均为 0.25。)在每个网格点 (x1,x2) 处,箭头都沿以下方向绘制
(1411)(x2x1)
例如,在 (1,0) 处,方向向量为 (1,4)T,而在 (−1,−1) 处,方向向量为 (−2,−5)T。(这两个方向向量以绿色显示。)所有方向向量都以相同的长度绘制,该长度足够短以防止附近的箭头交叉。
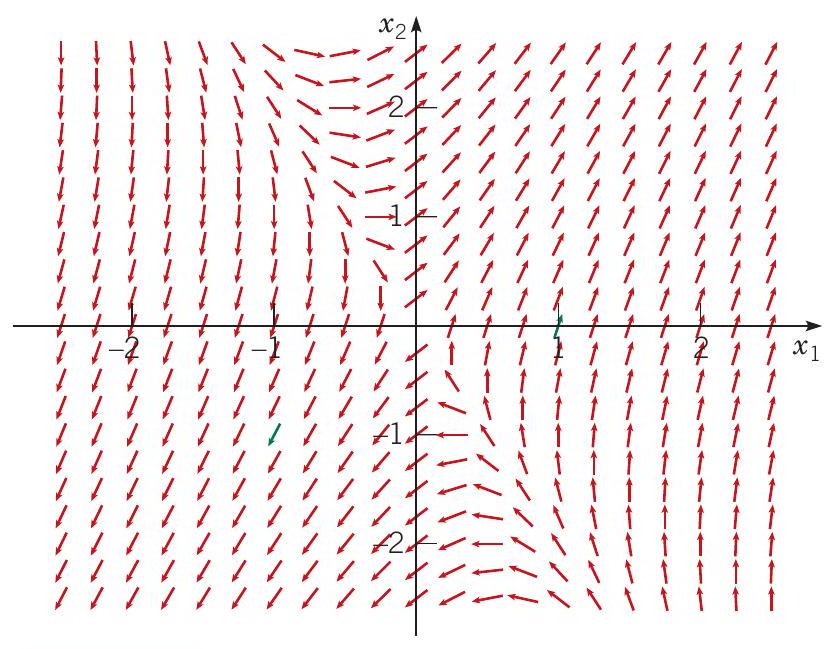
图 7.5.1 系统 (9) 的方向场。
解的轨迹遵循方向场中的箭头。特别地,观察到第二象限中的一个典型解最终会移动到第一或第三象限,第四象限中的一个典型解也是如此。另一方面,没有解离开第一或第三象限。此外,一个典型解似乎会离开原点附近,并最终具有大约为 2 的斜率。
为了显式地找到解,我们假设 x=ξert 并代入方程 (9) 中的 x。我们得到代数方程组
(1−r411−r)(ξ2ξ1)=(00).(10)
方程 (10) 具有非平凡解当且仅当系数的行列式为零。因此,允许的 r 值可从以下方程中找到
1−r411−r=(1−r)2−4=r2−2r−3=(r−3)(r+1)=0.(11)
方程 (11) 具有根 r1=3 和 r2=−1;这些是方程 (9) 中系数矩阵的特征值。
当 r=3 时,系统 (10) 中的两个方程简化为单个方程
−2ξ1+ξ2=0(12)
因此 ξ2=2ξ1,并且对应于 r1=3 的特征向量可以取为
ξ(1)=(21)(13)
类似地,对应于 r2=−1,我们发现 ξ2=−2ξ1,因此特征向量为
ξ(2)=(−21).(14)
微分方程的相应解为
x(1)(t)=(21)e3t,x(2)(t)=(−21)e−t(15)
这些解的 Wronskian 行列式为
W[x(1),x(2)](t)=e3t2e3te−t−2e−t=−4e2t,(16)
它永远不为零。因此,解 x(1) 和 x(2) 形成一个基本集,并且系统 (9) 的通解为
x=c1x(1)(t)+c2x(2)(t)=c1(21)e3t+c2(−21)e−t,(17)
其中 c1 和 c2 是任意常数。
为了可视化解 (17),考虑它在 x1x2-平面中对于常数 c1 和 c2 的各种值的图是很有帮助的。我们从 x=c1x(1)(t) 开始,或者用标量形式表示,
x1=c1e3t,x2=2c1e3t
通过在这两个方程之间消去t,我们看到这个解位于直线x2=2x1上;见图7.5.2a。这是穿过原点且方向与特征向量ξ(1)相同的直线。如果我们把解看作是运动粒子的轨迹,那么当c1>0时,粒子位于第一象限,当c1<0时,粒子位于第三象限。在任何一种情况下,粒子都会随着t的增加而远离原点。
接下来考虑x=c2x(2)(t),或
x1=c2e−t,x2=−2c2e−t.
这个解位于直线x2=−2x1上,其方向由特征向量ξ(2)决定。如图7.5.2a所示,当c2>0时,解位于第四象限,当c2<0时,解位于第二象限。在这两种情况下,粒子都会随着t的增加而向原点移动。
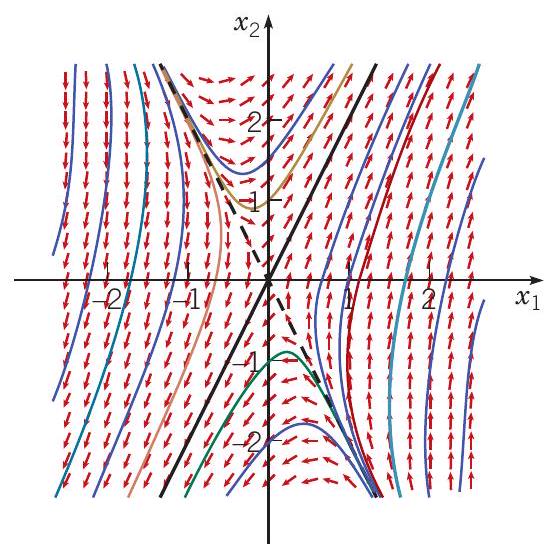
通解(17)是x(1)(t)和x(2)(t)的线性组合。对于较大的t,c1x(1)(t)项占主导地位,而c2x(2)(t)项变得可以忽略不计。因此,对于所有c1=0的解,当t→∞时,都渐近于直线x2=2x1。类似地,对于所有c2=0的解,当t→−∞时,都渐近于直线x2=−2x1。图7.5.2(a)是系统(9)的相图。x(1)和x(2)的基本解分别是实线和虚线黑色的曲线;图中还显示了几条其他的轨迹。图中轨迹的模式是所有特征值为实数且符号相反的2×2系统x′=Ax的典型模式。在这种情况下,原点被称为鞍点。鞍点始终是不稳定的,因为几乎所有轨迹都随着t的增加而远离它们。
(a)
(b)
(c)
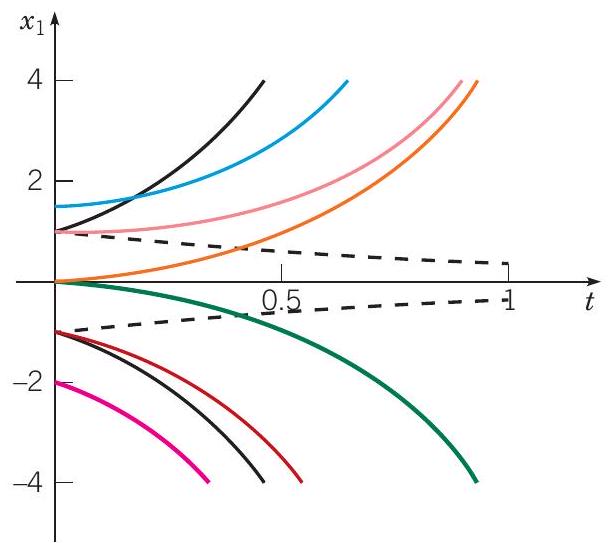
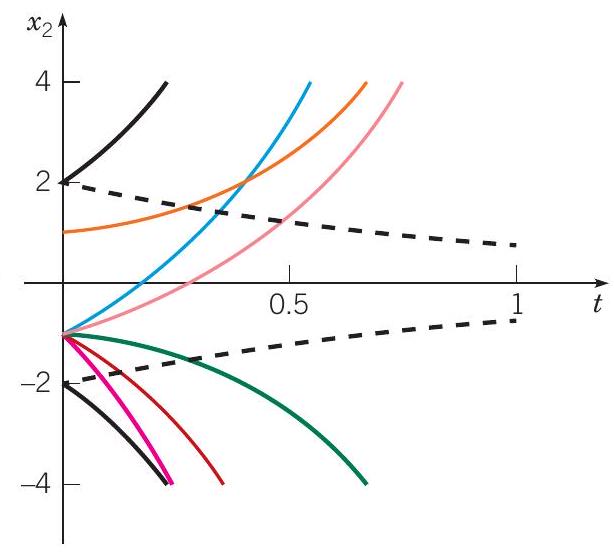
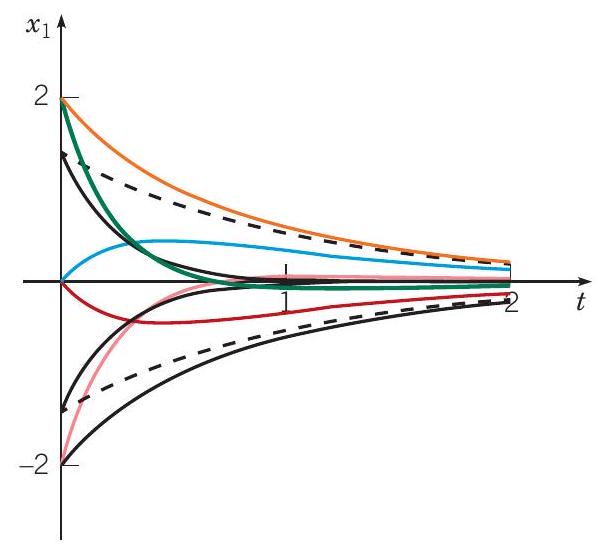
图7.5.2 (a) 系统(9)的相图;原点是一个鞍点。(b) 系统(9)中x1相对于t的典型图。(c) 系统(9)中x2相对于t的典型图。(b)和(c)中的分量图与其在(a)中的轨迹颜色一致。实线黑色和虚线黑色曲线分别显示了基本解x(1)和x(2)。紫色曲线是穿过点(-2,-1)的解,红色穿过点(-1,-1),绿色(0,-1),橙色(1,-1),蓝色(3/2,-1),金色(0,1)。
在前一段中,我们描述了在确定了特征值和特征向量后,如何手工绘制系统(如方程(9))的轨迹的定性正确的草图。然而,要生成详细而准确的图,例如图7.5.2(a)以及本章后面出现的其他图,计算机是非常有用的,即使不是必不可少的。
作为图7.5.2(a)的替代方案,您还可以绘制x1或x2作为t的函数;图7.5.2(b)显示了一些x1相对于t的典型图,图7.5.2c显示了x2相对于t的典型图。对于某些初始条件,可以得出结论,方程(17)中c1=0,因此x1=c2e−t且当t→∞时,x1→0。图7.5.2(b)中显示了这样一张图,对应于图7.5.2(a)中接近原点的轨迹。然而,对于大多数初始条件,c1=0,并且x1由x1=c1e3t+c2e−t给出。然后,由于正指数项的存在,随着t的增加,x1的幅度呈指数增长。图7.5.2(b)中显示了这种类型的几张图,对应于图7.5.2(a)中远离原点附近的轨迹。重要的是要理解(a)中的方向场与图7.5.2的(b)和(c)中的分量图以及稍后出现的其他类似图之间的关系,因为您可能希望在x1x2-平面中或作为自变量t的函数来可视化解。
例3
考虑系统
x′=(−322−2)x(18)
绘制该系统的方向场并找到其通解。然后绘制一个相图,显示相平面中的几个典型轨迹。
解:
图7.5.3中系统(18)的方向场清楚地表明所有解都接近原点。

FIGURE 7.5.3 系统 (18) 的方向场。
为了求出解,我们假设 x=ξert;然后我们得到代数系统
(−3−r22−2−r)(ξ2ξ1)=(00)(19)
特征值满足
(−3−r)(−2−r)−2=r2+5r+4=(r+1)(r+4)=0,(20)
所以 r1=−1 且 r2=−4。对于 r=−1,方程 (19) 变为
(−222−1)(ξ2ξ1)=(00).(21)
因此 ξ2=2ξ1,且对应于特征值 r1=−1 的特征向量 ξ(1) 可以取为
ξ(1)=(21).(22)
类似地,对应于特征值 r2=−4,我们有 ξ1=−2ξ2,所以特征向量为
ξ(2)=(1−2)(23)
因此,系统 (18) 的一组基本解为
x(1)(t)=(21)e−t,x(2)(t)=(1−2)e−4t(24)
通解为
x=c1x(1)(t)+c2x(2)=c1(21)e−t+c2(1−2)e−4t(25)
图 7.5.4(a) 显示了系统 (18) 的相图。对应于解 x(1)(t) 的轨迹是实黑曲线;它沿着直线 x2=2x1 接近原点。虚黑曲线是解 x(2)(t) 的轨迹;它沿着直线 x1=−2x2 接近原点。这些直线的斜率分别由特征向量 ξ(1) 和 ξ(2) 确定。通常,我们有两个基本解的组合。当 t→∞ 时,由于 e−4t 比 e−t 小得多,因此解 x(2)(t) 与 x(1)(t) 相比可以忽略不计。因此,除非 c1=0,否则解 (25) 沿着直线 x2=2x1 相切地接近原点。图 7.5.4(a) 中显示的轨迹的模式是所有 2×2 系统 x′=Ax 的典型情况,其中特征值是实数,不同且符号相同。对于这样的系统,原点称为节点。如果特征值是正的而不是负的,那么轨迹将是相似的,但会以外向的方向移动。如果特征值为负,则节点是渐近稳定的;如果特征值为正,则节点是不稳定的。
(a)
(b)
(c)
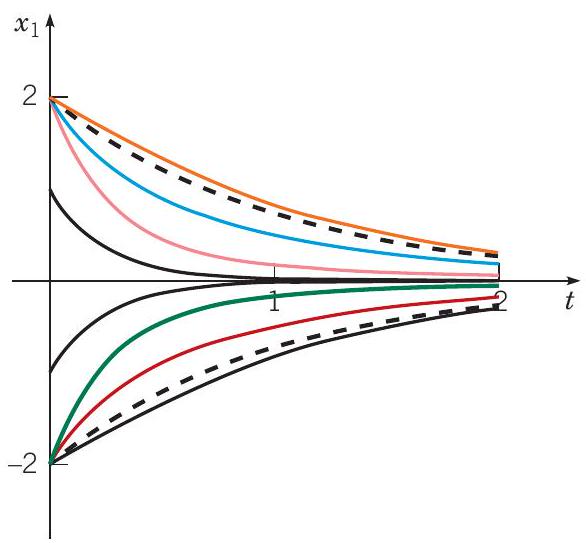
FIGURE 7.5.4 (a) 系统 (18) 的相图;原点是一个渐近稳定的节点。(b) 系统 (18) 的 x1 相对于 t 的典型图。(c) 系统 (18) 的 x2 相对于 t 的典型图。(b) 和 (c) 中的分量图根据其在 (a) 中的轨迹进行颜色编码。实黑和虚黑曲线分别显示了基本解 x(1) 和 x(2)。紫色曲线对应通过 (−2,−2) 的解,红色通过 (0,−2),绿色通过 (2,−2),橙色通过 (−2,2),蓝色通过 (0,2),金色通过 (2,2)。
尽管图 7.5.4(a) 是计算机生成的,但基于对特征值和特征向量的了解,可以快速手动绘制出轨迹的定性正确的草图。
图 7.5.4(b) 显示了一些 x1 相对于 t 的典型图;相应的 x2 相对于 t 的图显示在图 7.5.4(c) 中。观察到图 7.5.4(b) 和 7.5.4(c) 中的每个坐标图都随着 t 的增加而渐近地接近 t 轴,这对应于图 7.5.2(a) 中接近原点的轨迹。
示例 2 和 3 说明了特征值为实数且不同的 2×2 系统的两种主要情况。特征值要么符号相反(示例 2),要么符号相同(示例 3)。另一种可能性是零是特征值,但在这种情况下,它遵循 detA=0,这违反了本节开头所做的假设。但是,请参见问题 5 和 6。
回到一般的 n×n 系统 (1),我们像在例子中那样进行。为了找到微分方程 (1) 的解,我们必须从相关的代数系统 (8) 中找到 A 的特征值和特征向量。特征值 r1,…,rn(它们不必都不同)是 nth 次多项式方程的根
det(A−rI)=0(26)
特征值和对应的特征向量的性质决定了系统 (1) 的通解的性质。如果我们假设 A 是一个实值矩阵,那么我们必须考虑 A 的特征值的以下可能性:
- 所有特征值都是实数且互不相同。
- 一些特征值以复共轭对的形式出现。
- 一些特征值,无论是实数还是复数,都是重复的。
如果 n 个特征值都是实数且不同,就像前面三个例子一样,那么每个特征值都具有代数重数和几何重数 1。因此,与每个特征值 ri 相关联的是一个实特征向量 ξ(i),并且 n 个特征向量 ξ(1),…,ξ(n) 是线性独立的。微分系统 (1) 的对应解是
x(1)(t)=ξ(1)er1t,…,x(n)(t)=ξ(n)ernt(27)
为了证明这些解构成一个基本集,我们计算它们的 Wronskian 行列式:
W[x(1),…,x(n)](t)=ξ1(1)er1t⋮ξn(1)er1t⋯⋯ξ1(n)ernt⋮ξn(n)ernt=e(r1+⋯+rn)tξ1(1)⋮ξn(1)⋯⋯ξ1(n)⋮ξn(n)(28)
首先,我们观察到指数函数永远不为零。接下来,由于特征向量 ξ(1),…,ξ(n) 是线性独立的,所以方程 (28) 最后一项中的行列式非零。因此,Wronskian 行列式 W[x(1),…,x(n)](t) 永远不为零;因此 x(1),…,x(n) 构成一个基本解集。因此,方程 (1) 的通解为
x=c1ξ(1)er1t+⋯+cnξ(n)ernt(29)
如果 A 是实对称的(厄米特矩阵的一个特例),回忆一下第 7.3 节,所有特征值 r1,…,rn 必须是实数。此外,即使某些特征值是重复的,也总是存在一个完整的 n 个线性独立的特征向量集 ξ(1),…,ξ(n)(实际上是正交的)。因此,由方程 (27) 给出的微分系统 (1) 的对应解再次构成一个基本解集,并且通解再次由方程 (29) 给出。以下示例说明了这种情况。
示例 4
求通解
x′=011101110x(30)
解:
观察到系数矩阵是实对称的。该矩阵的特征值和特征向量在第 7.3 节的示例 5 中找到:
r1=2,ξ(1)=111;r2=−1,r3=−1;ξ(2)=10−1,ξ(3)=01−1.(31)(32)
因此,方程 (30) 的一个基本解集是
x(1)(t)=111e2t,x(2)(t)=10−1e−t,x(3)(t)=01−1e−t,(33)
并且通解是
x=c1111e2t+c210−1e−t+c301−1e−t.(34)
这个例子说明了这样一个事实:即使特征值(r=−1)的代数重数为 2,仍然有可能找到两个线性独立的特征向量 ξ(2) 和 ξ(3),并因此构造通解 (34)。
解 (34) 的行为很大程度上取决于初始条件。对于较大的 t 值,方程 (34) 右边的第一项,由于其正指数,是主导项;因此,如果 c1=0,则 x 的所有分量都将随着 t→∞ 而变得无界。另一方面,对于某些初始点,c1 将为零。在这些情况下,解只包含负指数项,并且当 t→∞ 时,x→0。导致 c1 为零的初始点恰好是位于由对应于两个负特征值的特征向量 ξ(2) 和 ξ(3) 确定的平面上的点。因此,从该平面开始的解在 t→∞ 时趋近于原点,而所有其他解都变得无界。
如果某些特征值以复共轭对的形式出现,那么如果所有特征值都不同,仍然存在 n 个形如 (27) 的线性无关解。当然,由复特征值产生的解是复数值的。但是,与第 3.3 节中一样,可以获得完整的实数值解集。这将在第 7.6 节中讨论。
如果特征值是重根,则会发生更严重的困难。在这种情况下,相应的线性无关特征向量的数量可能小于特征值的代数重数。如果是这样,形如 ξert 的线性无关解的数量将小于 n。为了构造基本解集,有必要寻找其他形式的附加解。这种情况有点类似于具有常系数的 nth 阶线性方程;特征方程的重根会导致 ert,tert,t2ert,… 形式的解。重特征值的情况将在第 7.8 节中讨论。
最后,如果 A 是复数,那么复特征值不必以共轭对的形式出现,并且即使相关的特征值可能是实数值的,特征向量通常也是复数值的。只要有 n 个线性无关的特征向量,微分方程 (1) 的解仍然是 (27) 的形式,但通常所有解都是复数值的。